Cosine Waveform Load
The Cosine Waveform Load subcircuit models a time-varying load with a cosinusoidal current. At time=0, the load begins at the FINAL_CURRENT value and has a cosine function. The Cosine Waveform Load is not used in any test objectives, but you can change any load to a cosine load with a Cos() function call in a Load column.
Other similar loads include:
- Sine Load - similar to the Cosine Waveform Load but with a sine function.
In this topic:
| DVM Information | Power Supply (Non-DVM) Information | |||||||
| Model Name | Cosine Waveform Load | |||||||
| Simulator |
|
|||||||
| Parts
Selector Menu Location |
|
|||||||
| Symbol Library | SIMPLIS_DVM_ADVANCED.sxslb | power_supply_source_and_loads.sxslb | ||||||
| Model File | SIMPLIS_DVM_ADVANCED.lb | power_supply_source_and_loads.lb | ||||||
| Subcircuit Name |
|
POWER_SUPPLY_LOAD_COS | ||||||
| Symbols |
|
|
||||||
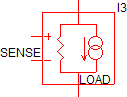
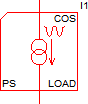
| Schematic - 2 Terminal |
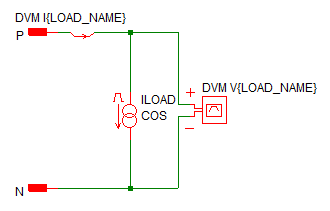
Note: Power Supply probes will not have the "DVM" prefix.
|
|||||||
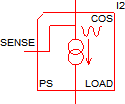
| Schematic - 3 Terminal |
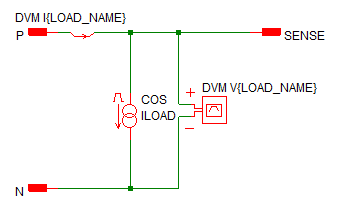 Note: Power Supply probes will not have the "DVM" prefix.
|
|||||||
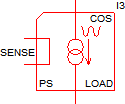
| Schematic - 4 Terminal |
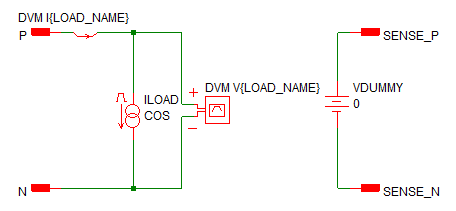 Note: Power Supply probes will not have the "DVM"
prefix.
|
|||||||


Parameters
The following table explains the relevant parameters.
| Parameter Name | Default | Data Type | Range | Units | Parameter Description |
| COEFFICIENT | 0 | Real | The damping coefficient for the cosinusoidal load current. If non-zero, the cosinusoidal load current amplitude will decay with a time constant equal to ???MATH???\frac{1}{\text{COEFFICIENT}}???MATH???. | ||
| FINAL_CURRENT | 750m | Real | A | The peak or maximum current for the load. This can be a numeric value or a symbolic value, such as a percentage of full load. | |
| FREQUENCY | 10k | Real | min: > 0 | Hz | The frequency of the cosine waveform load |
| IDLE_IN_POP | 0 | Real | 0 or 1 | If set to 0, the load current during the POP analysis is set to the FINAL_CURRENT; otherwise, the load will be active during the POP analysis. | |
| LOAD_NAME | LOAD | String | n/a | n/a | Name of the DVM load. This name cannot contain spaces. |
| OFF_UNTIL_DELAY | 0 | Real | 0 or 1 | If set to 1, the load current will be ???MATH???\frac{1}{2}\left(\text{START_CURRENT}+\text{FINAL_CURRENT}\right)???MATH??? until the time specified by TIME_DELAY. If set to 0, the value of TIME_DELAY is interpreted as a phase delay. | |
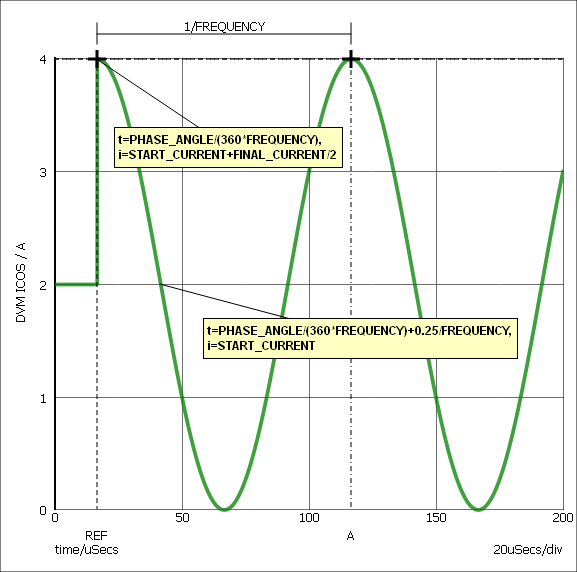
| PHASE_ANGLE | 90 | Real | ° | The phase angle of the cosinusoidal waveform, used only if the USE_PHASE parameter is 1. | |
| START_CURRENT | 0 | Real | A | The minimum or starting current for the cosine waveform load. This can be a numeric value or a symbolic value, such as a percentage of full load. | |
| TIME_DELAY | 10u | Real | min: 0 | s | The delay before the cosinusoid starts. The load behavior before the TIME_DELAY is determined by the OFF_UNTIL_DELAY parameter. |
| USE_PHASE | 0 | Real | 0 or 1 | If set to 1, the load is configured to use the phase angle supplied by the PHASE_ANGLE parameter. |
Testplan Entry
To set any managed DVM load to a Cosine Waveform Load subcircuit, place a Cos() testplan entry in a Load column.
The Cos() testplan entry has the following syntax with the arguments taken from the list of parameters above.
Cos(REF, START_CURRENT, FINAL_CURRENT, FREQUENCY) Cos(REF, START_CURRENT, FINAL_CURRENT, FREQUENCY, OPTIONAL_PARAMETER_STRING)
| Argument | Range | Description |
| REF | n/a | The actual reference designator of the DVM load or the more generic syntax of OUTPUT:n where n is an integer indicating a position in the list of managed DVM loads. |
| START_CURRENT | n/a | The minimum or starting current for the cosine waveform load. This can be a numeric value or a symbolic value, such as a percentage of full load. |
| FINAL_CURRENT | n/a | The peak or maximum current for the cosine wave load. This can be a numeric value or a symbolic value, such as a percentage of full load. |
| FREQUENCY | min: > 0 | The frequency of the cosine waveform load. |
| OPTIONAL_PARAMETER_STRING | n/a | Parameter string with any of the other parameters from the parameter table above* |
* If multiple parameters are specified, join the parameter key-value pairs with a space, as shown in the examples below. The order of the parameter names does not matter.
Examples
The following examples set the first DVM managed load to a Cosine Waveform Load with a starting current of 2A and a peak-to-peak current of 4A. The timing parameters and the optional parameter strings are different for each example.
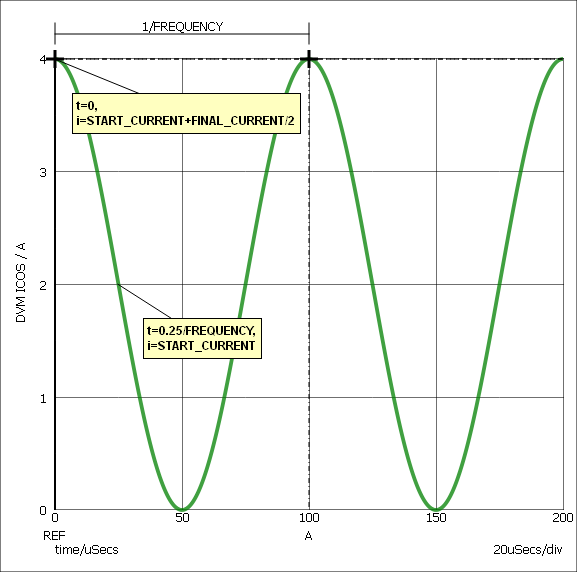
Zero Time Delay Example
Since the TIME_DELAY parameter is set to zero, the pulse waveform begins with the START_CURRENT + FINAL_CURRENT value divided by 2 at t=0.
| *?@ Load |
|---|
| Cos(OUTPUT:1 , 2 , 4 , 10k , TIME_DELAY=0u) |
The results of this testplan entry are shown below:
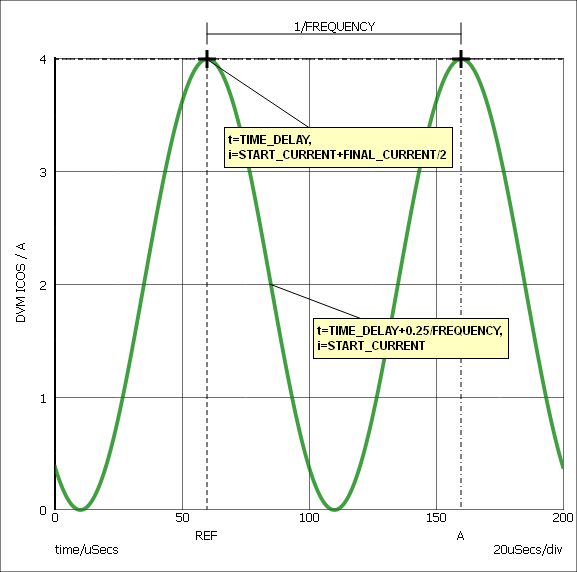
Time Delay Example
In this example, the TIME_DELAY parameter is set to 60μs. Since the OFF_UNTIL_DELAY parameter is not specified, the TIME_DELAY is interpreted as a phase delay, meaning that the waveform is active from time=0.
| *?@ Load |
|---|
| Cos(OUTPUT:1 , 2 , 4 , 10k , TIME_DELAY=60u) |
The results of this testplan entry are shown below:
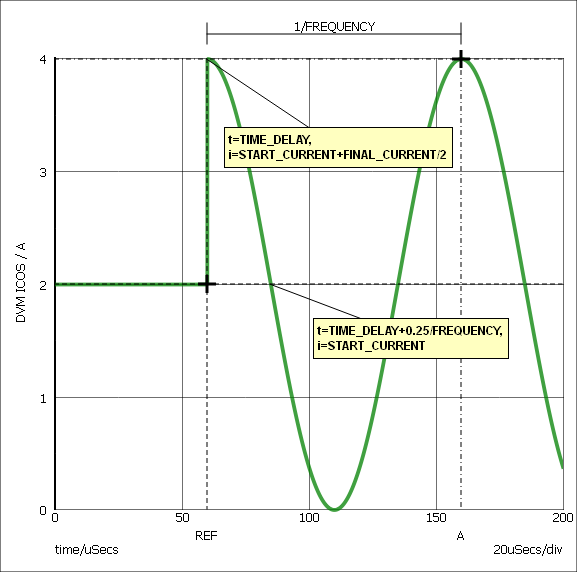
Time Delay Example With OFF_UNTIL_DELAY=1
In this example the TIME_DELAY parameter is set to 60μs, and the OFF_UNTIL_DELAY is set to 1; therefore, for simulation times less than the TIME_DELAY parameter, the load current is 2A, which is the value of the START_CURRENT argument.
| *?@ Load |
|---|
| Cos(OUTPUT:1 , 2 , 4 , 10k , OFF_UNTIL_DELAY=1 TIME_DELAY=60u) |
The results of this testplan entry are shown below:
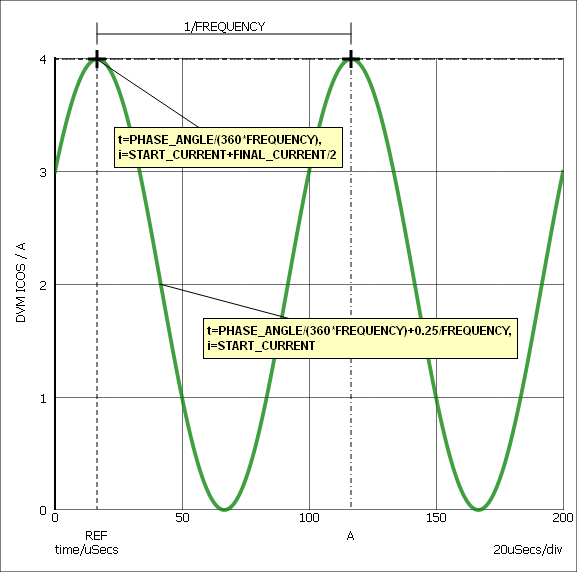
Phase Delay Example
In this example, the USE_PHASE parameter is set to 1, and the PHASE_ANGLE parameter is set to 60. Setting USE_PHASE to 1 configures the load to use the PHASE_ANGLE parameter to determine the effective time delay. The time delay is calculated by:
\[ \text{TIME_DELAY} = \frac{\text{PHASE_ANGLE}}{\text{360*FREQUENCY}} \]
| *?@ Load |
|---|
| Cos(OUTPUT:1 , 2 , 4 , 10k , USE_PHASE=1 PHASE_ANGLE=60) |
The results of this testplan entry are shown below:
Phase Delay Example With OFF_UNTIL_DELAY=1
In this example the PHASE_ANGLE parameter is set to 60, and the OFF_UNTIL_DELAY is set to 1; therefore, for simulation times less than the time delay defined by the PHASE_ANGLE parameter, the load current is 2A, which is the value of the START_CURRENT argument.
| *?@ Load |
|---|
| Cos(OUTPUT:1 , 2 , 4 , 10k , OFF_UNTIL_DELAY=1 USE_PHASE=1 PHASE_ANGLE=60) |
The results of this testplan entry are shown below: